Инструкция разметки колонного аппарата
Координатно-измерительная мобильная система КИМ СРЦ для разметки элементов внутри цилиндрических изделий
ПОДГОТОВКА КИМ СРЦ К РАБОТЕ
1. Разметка оси цилиндра.
1. Разметка оси цилиндра.
1. Разметка оси цилиндра.
За ось цилиндра или ось колонного аппарата принимаем линию, соединяющую два центра окружности в крайних сечениях цилиндра.
Центры окружностей в сечениях образованны пересечением 2-х струн (Рисунок 1, позиция «8»).
Центры окружностей получаем следующим образом:
1) С помощью измерительной ленты «7» делим окружность L=2ПR на 4 равные части Х=L/4= ПR/2.
2) Настраиваем вертикальную линию по отвесу.
3) Размечаем четыре опорные точки кернером или маркером.
4) С помощью струбцины «9» закрепляем и натягиваем леску в опорных точках цилиндра. Получили центры окружностей в виде двух крестов.
5) Линия, соединяющая центры окружностей в двух крайних сечениях цилиндра, принимаем за ось внутри цилиндрического изделия.
6) В дальнейшем все измерения и разметка элементов внутри цилиндрического изделия проводятся КИМ СРЦ
лазерно-оптической системой с электронными приборами с привязкой к оси цилиндрического изделия.
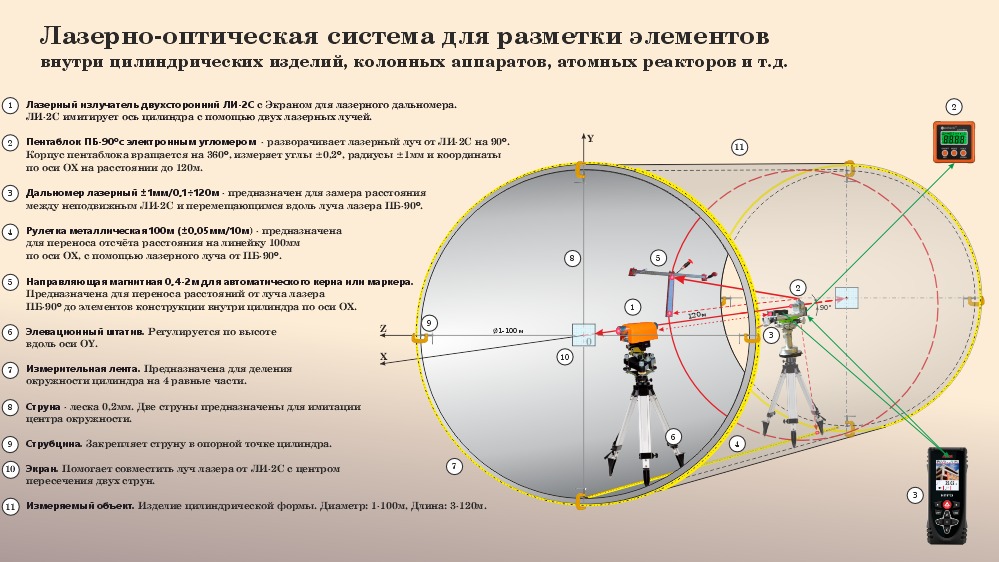
Рисунок 1
2. Совмещение лазерного луча с осью цилиндра.
1) Лазерный излучатель двухсторонний ЛИ-2С (Рисунок 1, позиция «1») устанавливаем по уровню внутри колонного аппарата на элевационный штатив «6», на расстоянии 1-5м от ближайшего центра окружности и включаем два лазерных луча. Нужно помнить,
что лучи настроены в одну линию по углу, с погрешностью ±0,7мм/10м.
2) Экраны «10» - это ламинированная миллиметровая бумага. Их нужно закрепить неподвижно или держать рукой за крестом из двух лесок, на расстоянии 10см. Центральную точку лазерного луча наводим на центр пересечения лесок и видим проекцию тени пересечения лесок на экране.
3) Настраиваем проекцию центра луча лазера от ЛИ-2С «1» на экране «10» с ближним крестом из двух лесок. Для этого используем только вертикальную подвижку по оси ОУ и поперечную подвижку по оси ОZ элевационного штатива «6» и излучателя «1» соответственно.
4) Второй луч лазера наводим на дальний экран «10» и совмещаем его со вторым крестом. При этом применяем только две угловые подвижки. По тангажу наклоняем одним винтом трегера, а по азимуту наводящим винтом прибора
при зафиксированным закрепительным винте прибора.
5) Повторяем настройки по пункту 3 и 4 несколько раз до совмещения центра луча оси лазера
с центром окружностей, с точностью ±0,1мм/10м.
3. Настройка пентаблока ПБ 90°±2´´ДУ на систему координат цилиндра.
1) Необходимо пользоваться паспортом и руководством по эксплуатации Пентаблока ПБ 90°±2ʺ.
2) Внизу цилиндрического изделия необходимо натянуть усилием 5кг и закрепить рулетку (Рисунок 1, позиция «4») длиной 10-50м. Рулетка должна иметь погрешность ±0,2мм/10м, её нужно выбирать из нескольких, методом сравнения с эталоном. С другой стороны, лазерный дальномер Leica Disto X4 «3» имеет погрешность СКП±1мм/1÷150м. Одновременно он измеряет углы с погрешностью ±0,1°±6ʹ
Это удобно при измерении внутри цилиндрического изделия.
3) Пентаблок ПБ 90°±2ʺ с лазерным дальномером и электронным угломером «2» устанавливаем на элевационный штатив.
4) Настраиваем Пентаблок на ось лазерного луча (смотреть паспорт Пентаблока, пункт 8.2). Таким образом мы совместим ось лазерного луча с осью вращения пентапризмы.
5) Направляем луч лазера, выходящий из пентапризмы вниз на точку отсчёта, находящуюся на определённом расстоянии от края измеряемого изделия. Совмещаем центральную точку луча лазера с точкой отсчёта, при помощи продольной подвижки вдоль оси ОХ.
6) Включаем лазерный угломер. На дисплее получаем углы поворота пентапризмы.
7) Включаем лазерный дальномер. На дисплее получаем расстояние от лазерного дальномера до экрана, установленного на лазерном излучателе.
РАБОТА С КИМ СРЦ

Рисунок 2
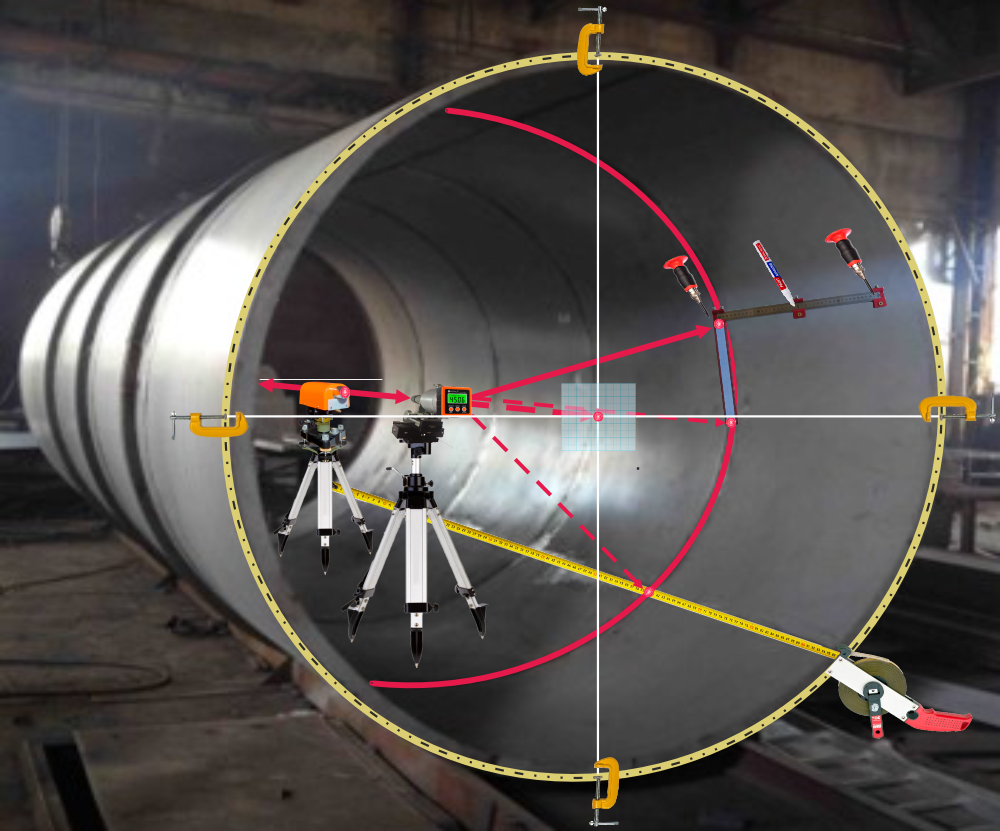
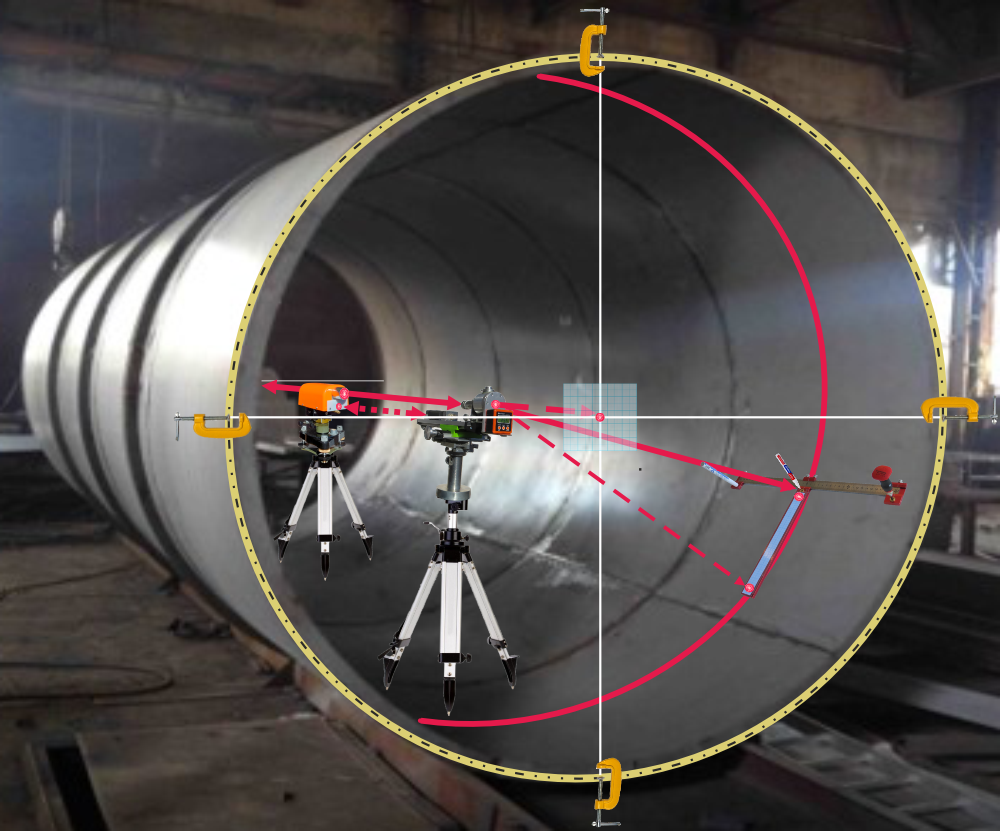
Разметка элементов конструкции внутри цилиндрического изделия на примере колонного аппарата. Измерения расстояний, углов и радиусов.
1) Подготовка КИМ СРЦ к работе описана в пункте 8.
2) Измеряем расстояние с помощью дальномера и обнуляем показания угломера. Поворачиваем пентапризму на заданные углы на 360°. Делаем разметку сразу трёх сечений внутри колонного аппарата. Направляющая линейка на магнитах устанавливается в плоскость сечения по двум центральным точкам луча лазера. Затем наносится разметка трёх сечений с шагом до 500мм по делениям линейки.
Сечения наносятся чертилкой или белым маркером по набитым точкам от автоматического керна.
3) Снимаем угломер и на его место устанавливаем лазерный дальномер, с помощью болта крепления. Дальномер устанавливаем ребром к оси вращения пентапризмы. С помощью дальномера и его угломера измеряем радиусы и углы внутри колонного аппарата.
4) Пентаблок со штативом переносим вдоль луча лазера на новое положение. Настраиваем его методом,
описанным в разделе 8.3, пункты 4, 5, 6, 7. Смотреть (Рисунок 2).
5) Включаем дальномер и по его показаниям перемещаем пентаблок при помощи продольной подвижки, вдоль оси ОХ на необходимое расстояние.
6) При следующей разметке вдоль оси ОХ повторяем действие пункта 2 - 5.
2) Измеряем расстояние с помощью дальномера и обнуляем показания угломера. Поворачиваем пентапризму на заданные углы на 360°. Делаем разметку сразу трёх сечений внутри колонного аппарата. Направляющая линейка на магнитах устанавливается в плоскость сечения по двум центральным точкам луча лазера. Затем наносится разметка трёх сечений с шагом до 500мм по делениям линейки.
Сечения наносятся чертилкой или белым маркером по набитым точкам от автоматического керна.
3) Снимаем угломер и на его место устанавливаем лазерный дальномер, с помощью болта крепления. Дальномер устанавливаем ребром к оси вращения пентапризмы. С помощью дальномера и его угломера измеряем радиусы и углы внутри колонного аппарата.
4) Пентаблок со штативом переносим вдоль луча лазера на новое положение. Настраиваем его методом,
описанным в разделе 8.3, пункты 4, 5, 6, 7. Смотреть (Рисунок 2).
5) Включаем дальномер и по его показаниям перемещаем пентаблок при помощи продольной подвижки, вдоль оси ОХ на необходимое расстояние.
6) При следующей разметке вдоль оси ОХ повторяем действие пункта 2 - 5.